Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 Ces besoins en copies multiples sont particulièrement avérés pour les caméras de vision prospective par ordinateur, mais ils s’appliqueront bientôt à d’autres caméras, aux capteurs radar et aux détecteurs et localisateurs de lumière (LIDAR) dans les véhicules autonomes. Une application actuelle très commune de réplication est l’enregistrement
des données (Figure 1).
Ces besoins en copies multiples sont particulièrement avérés pour les caméras de vision prospective par ordinateur, mais ils s’appliqueront bientôt à d’autres caméras, aux capteurs radar et aux détecteurs et localisateurs de lumière (LIDAR) dans les véhicules autonomes. Une application actuelle très commune de réplication est l’enregistrement
des données (Figure 1).
Dans les applications de vision par ordinateur, il est courant d’enregistrer les données brutes de capteur sur certains événements de conduite en vue d’une analyse future. Dans ces cas, il est utile de disposer d’une seconde copie des données brutes de capteur agrégées pour l’enregistrement des données, alors que l’autre copie est utilisée pour le traitement lié à la vision par ordinateur.
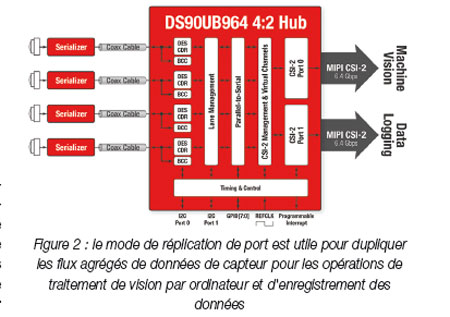
La réplication des données est possible à différentes étapes du trajet vidéo. Il est possible de connecter chaque capteur par des câbles séparés aux unités de vision par ordinateur et aux unités de commande électronique (ECU) d’enregistrement des données, mais cela double le nombre de câbles nécessaires. Au contraire, il est souvent plus simple de partager les données après l’agrégation des données du capteur. Par exemple, le hub désérialiseur quad DS90UB964-Q1 peut agréger les données brutes provenant de jusqu’à quatre capteurs différents et créer deux copies des données combinées sans composants externes tels que diviseurs et puces. Les algorithmes de vision par ordinateur (tels que la reconnaissance d’objet) peuvent traiter un flux, alors que l’autre flux est enregistré dans la mémoire pour l’enregistrement des données (Figure 2).
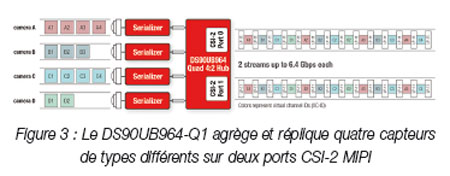
Les capteurs connectés ne doivent pas nécessairement être identiques ; la combinaison de plusieurs capteurs de type, résolution et vitesse différents peut offrir de véritables systèmes de fusion de capteur. Par exemple, vous pouvez fusionner les données de plusieurs caméras à différentes fréquences d’images ainsi que de capteurs radar séparés.
La Figure 3 présente un système à quatre caméras, avec des fréquences de données différentes illustrées par des blocs colorés. Les données agrégées sont présentées sur les ports 0 et 1 de l’interface série de la caméra (CSI)-2 MIPI. Le bus CSI-2 fonctionne avec des « salves », c’està-dire qu’il fonctionne à une fréquence de données fixe, libère par salves les données disponibles et revient à un état de basse puissance (LP) au repos. Ainsi, la vitesse du capteur peut varier sans modifier la temporisation du processeur de l’ECU. Bien que les liaisons du capteur fonctionnent à des fréquences indépendantes, le hub désérialiseur présente les données au processeur à système sur puce (SoC) sur une seule horloge de référence, simplifiant la temporisation du système.
Le DS90UB964-Q1 supporte le remodelage de l’ID du canal virtuel CSI-2 MIPI. Les canaux virtuels séparent les données du capteur dans le flux agrégé afin que le processeur puisse déterminer facilement de quel capteur provient tel paquet au lieu de devoir compter chaque bit par des approches de compilation de bits. Le processeur lit simplement le champ d’ID (VC-ID) virtuel dans le titre pour déterminer l’adresse du canal virtuel. Si les capteurs utilisent déjà des ID de VC identiques, ils peuvent être remodelés en ID de VC inutilisés pour distinguer les données entrantes. Avec jusqu’à 1,6 Gbps/ligne, un total de 6,4 Gbps de largeur de bande par port est disponible pour to supporter quatre capteurs +1MP/60 fps, 2MP/30fps ou radar satellitaires, ou une combinaison de capteurs différents.
L’enregistrement des données jouera un rôle de plus en plus important dans l’ADAS, en particulier pour les applications de conduite autonome. La réplication des données des capteurs est souvent la plus efficace juste après l’agrégation des données du capteur. Les nouveaux produits intègrent la fonction de réplication pour éliminer les diviseurs externes et offrent de nouvelles possibilités architecturales pour les futures applications automobiles ADAS.



