Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
![]() En comprenant les méthodes d’entraînement bipolaire et unipolaire, les concepteurs sont mieux placés pour mettre en œuvre une solution réellement optimisée.
En comprenant les méthodes d’entraînement bipolaire et unipolaire, les concepteurs sont mieux placés pour mettre en œuvre une solution réellement optimisée.
Clémence Muron, ingénieur d’application chez Portescap, aborde les différences entre les variateurs bipolaires et les variateurs unipolaires pour les moteurs pas-à-pas, et examine leurs avantages et leurs limites dans des applications spécifiques.
Pour les applications nécessitant un positionnement précis et prévisible dans un coffret compact et économique, les moteurs pas-à-pas (aussi appelés stepper) sont un choix populaire depuis leur introduction dans les années 1960. Ces dernières années, les progrès réalisés tant dans les moteurs eux-mêmes que dans l’électronique de contrôle ont donné aux moteurs pas-à-pas des avantages en matière de performance décisifs pour des applications exigeantes allant des machines-outils aux équipements médicaux.
La simplicité de la technologie de pilotage des moteurs pas-à-pas modernes est l’une des clés de leur succès durable. Malgré tout, certaines décisions de conception doivent tout de même être prises pour leur méthode de contrôle, ce qui peut avoir une influence considérable sur le succès de l’application. Le concepteur doit notamment déterminer si les contrôles des moteurs doivent être unipolaires ou bipolaires.
Il est vrai que de nombreuses applications de moteurs pas-à-pas sont aujourd’hui implémentées avec un contrôleur bipolaire. Cependant, des moteurs unipolaires sont toujours disponibles sur le marché et doivent être préférés dans certaines circonstances. C’est en analysant les différences, avantages et inconvénients entre ces deux technologies que le concepteur sera en mesure de prendre la décision technologique la plus appropriée pour une application donnée.
Le moteur pas-à-pas est un type de moteur à courant continu (cc) sans balais avec un nombre élevé de pôles. Cette technologie est généralement pilotée en boucle ouverte sans aucun capteur de rétroaction, ce qui signifie que le courant est typiquement appliqué sur les phases sans connaître la position du rotor. Le rotor se déplace de sorte à être aligné avec le flux magnétique du stator, puis le courant peut être fourni à la phase suivante.
Comme mentionné précédemment, il existe deux méthodes d’alimentation de la bobine : bipolaire et unipolaire. Un moteur unipolaire nécessite un minimum de deux bobines par phase, et la commutation des transistors dans l’électronique de contrôle voit le courant circuler dans un seul sens pour chaque bobine. L’électronique est simple à concevoir, car il n’y a qu’un seul transistor par bobine. Lorsque le transistor est fermé, la bobine est alimentée. Pour faire tourner le moteur, les transistors sont fermés et ouverts en séquence.
En revanche, dans un moteur bipolaire, il faut au moins une bobine par phase et le courant peut circuler dans les deux sens à travers les bobines. Dans l’électronique de pilotage, deux fois plus de transistors sont nécessaires pour un moteur avec le même nombre de phases.
En ce qui concerne le câblage, un moteur unipolaire peut être alimenté par 6 ou 8 fils, tandis qu’un moteur bipolaire est généralement alimenté par 4 ou 8 fils. Pour les versions à 8 fils, selon la manière dont ces fils sont connectés, le moteur peut être configuré comme unipolaire ou bipolaire. Pour la configuration bipolaire, les bobines peuvent être montées en série ou en parallèle, ce qui influence les caractéristiques électriques des bobines, impactant la tension et la résistance. La version à 8 fils offre une plus grande flexibilité au concepteur pour répondre aux besoins de performances particuliers de l’application.
Il existe un certain nombre de stratégies de contrôle différentes à envisager, mais nous allons nous concentrer sur le variateur de tension et le variateur de courant. Dans le cas du variateur de tension, le contrôle des moteurs unipolaires est très simple et il ne nécessite que quatre transistors. Une unité de contrôle bipolaire pour le variateur de tension, d’autre part, nécessite huit transistors configurés dans deux ponts en H. Pour le variateur de tension, la stratégie de contrôle unipolaire est donc beaucoup plus simple et plus abordable.
Mais il faut également prendre en compte les questions de performances. Dans le cadre d’un variateur de tension, le moteur bipolaire offre plus de couple, tandis qu’un moteur unipolaire présente un couple plus faible à basse vitesse, principalement en raison des pertes par effet Joule. Cependant, dans un cas précis à haute vitesse, le moteur unipolaire peut parfois offrir un couple plus élevé que le bipolaire, car le courant peut circuler plus rapidement dans la bobine.
Là où le couple est important, le moteur bipolaire peut produire généralement 40 % de couple de plus qu’un contrôle unipolaire ou, autrement dit, pour la même dissipation de puissance Joule, le bipolaire propose une meilleure puissance qu’un unipolaire.
Qu’en est-il du variateur de courant ? Avec la baisse du coût de l’électronique, la modulation d’impulsion en durée (PWM) est devenue le choix préféré pour le contrôle des moteurs pas-à-pas, en faisant varier le cycle de service à une fréquence fixe pour ajuster la tension ou le courant dans la valeur cible souhaitée. Pour un variateur de courant, la PWM contrôle le courant dans chaque phase.
Avec un moteur bipolaire, l’électronique moderne facilite la mise en œuvre d’un driver de courant PWM, offrant ainsi la possibilité d’entraîner le moteur par micro-pas. Le contrôle d’un moteur unipolaire en mode courant nécessite une électronique beaucoup plus complexe et réduit les performances du moteur.
En conclusion, nous pouvons constater que les avantages du contrôle PWM et la baisse des coûts de l’électronique tendent à populariser l’utilisation de moteurs pas-à-pas bipolaires dans les variateurs de courant. Mais pour ce qui est des variateurs de tension, si la simplicité et/ou le coût sont des considérations clés, ou lorsqu’un couple accru à des vitesses plus élevées est nécessaire, le variateur unipolaire demeure une option.
Comme toujours, nous vous encourageons à discuter avec un fournisseur compétent tel que Portescap dès les premières étapes d’un projet, afin que le concepteur puisse adopter la solution la plus appropriée à une application donnée.
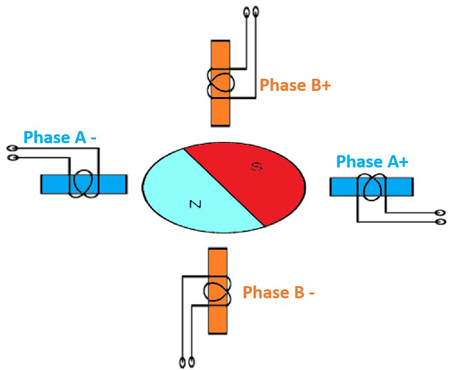
Image 1 : Diagramme d’un moteur pas-à-pas à aimant permanent et à quatre pas. Le rotor est constitué d’un aimant à une paire de pôles et le stator est composé de deux phases, la Phase A et la Phase B.
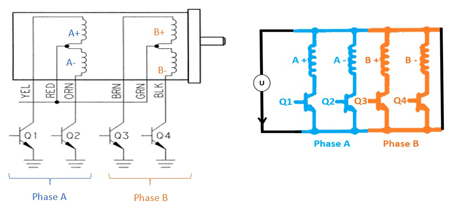
Image 2 : Un moteur unipolaire constitué de deux bobines par phase. Pour chaque bobine, le courant ne peut circuler que dans un seul sens. Le variateur de tension est simple et il ne nécessite qu’un transistor par bobine.
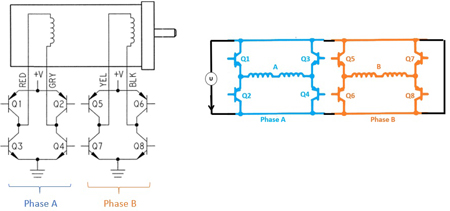
Image 3 : Les moteurs bipolaires ne nécessitent qu’une bobine par phase, et le courant peut circuler dans les deux directions. Pour le contrôle, huit transistors avec deux ponts en H sont nécessaires.
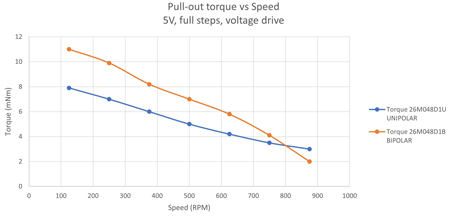
Image 4 : Couple par rapport à vitesse, en mode variateur de tension, pour les moteurs unipolaires et bipolaires



