Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 À l’origine, ces derniers étaient d’une simplicité enfantine, ne contenant rien d’autre qu’une radio analogique. Mais aujourd’hui, les systèmes d’infodivertissement modernes fournissent bien plus que juste de la musique et des flashs actus au conducteur et aux passagers. Non contentes de lire de la musique à partir d’outils de stockage comme des cartes SD ou des clés USB, les radios actuelles sont capables de recevoir différentes largeurs de bande, décryptant à la fois les signaux analogiques et numériques. Par ailleurs, il est désormais possible de connecter des terminaux mobiles aux systèmes d’infodivertissement via Bluetooth pour lire de la musique et passer des appels téléphoniques, rendant parfaite l’intégration des appareils personnels au sein de la voiture.
À l’origine, ces derniers étaient d’une simplicité enfantine, ne contenant rien d’autre qu’une radio analogique. Mais aujourd’hui, les systèmes d’infodivertissement modernes fournissent bien plus que juste de la musique et des flashs actus au conducteur et aux passagers. Non contentes de lire de la musique à partir d’outils de stockage comme des cartes SD ou des clés USB, les radios actuelles sont capables de recevoir différentes largeurs de bande, décryptant à la fois les signaux analogiques et numériques. Par ailleurs, il est désormais possible de connecter des terminaux mobiles aux systèmes d’infodivertissement via Bluetooth pour lire de la musique et passer des appels téléphoniques, rendant parfaite l’intégration des appareils personnels au sein de la voiture.
Dans le même temps, les voitures modernes sont désormais équipées de série de systèmes de navigation puissants qui s’appuient sur les coordonnées GPS et des données en temps réel obtenues sur Internet afin de déterminer l’itinéraire le plus rapide pour le conducteur. Mais la connexion Internet ne sert pas uniquement au système de navigation : certains véhicules mettent à la disposition des passagers un point d’accès Wi-Fi pour leur permettre de connecter leur téléphone pendant le trajet. Le nombre de caractéristiques et de fonctionnalités ne cesse d’augmenter à chaque nouvelle génération de systèmes d’infodivertissement, mais la base reste la même : l’alimentation électrique doit rester stable et fiable quelles que soient les conditions d’utilisation. Le présent article s’intéresse justement à l’architecture du système d’alimentation requis pour faire fonctionner un système d’infodivertissement de pointe. Il répertorie les différents problèmes à résoudre pour concevoir ce type d’application et présente un schéma de référence testé et validé pour la gestion de l’alimentation.
Les systèmes d’infodivertissement modernes cumulent plusieurs charges qui doivent être alimentées avec généralement deux tensions d’alimentation principales. Le schéma de référence décrit dans cet article présente un rail d’alimentation d’une tension de +3,3 V à 3,0 A (pic à 6,0 A) et un de +7,5 V à 1,5 A (pic à 2,5 A). Le rail de +3,3 V permet d’alimenter des charges comme le récepteur ou les microprocesseurs directement ou à l’aide de convertisseurs de point de charge basse tension. Quant à la chaîne de +7,5 V, elle sert notamment pour la tension de polarisation fantôme des microphones de kit mains libres et des dispositifs de réduction du bruit, les antennes actives (FM, AM, GPS, DAB), les caméras de recul ou les lecteurs de CD.
Deux convertisseurs Buck sont utilisés pour générer ces tensions de sortie. Ce dispositif fonctionne très bien en conditions normales, lorsque la tension de la batterie s’élève à quelque 12,0 V, mais aussi à basse température, lorsque la tension de la batterie chute au moment du démarrage du moteur (qui requiert une forte tension). Compte tenu de la présence de systèmes d’arrêt et de redémarrage automatique du moteur (start-stop) dans les voitures actuelles, cette chute de tension est susceptible de se produire non seulement au premier démarrage mais aussi à tout moment en trafic urbain. Les spécifications pour ces profils de tension de batterie varient et peuvent parfois descendre jusqu’à 3,2 V. Il est toutefois évident qu’avec une tension d’entrée si basse, les deux tensions de sortie ne peuvent être maintenues en recourant uniquement à des hacheurs série. Il faut donc installer un « convertisseur pré-boost » permettant d’alimenter les hacheurs avec une tension d’entrée suffisamment élevée pour maintenir les tensions de sortie à leur niveau prévu. Ce pré-boost n’a besoin d’être actif que lorsque la tension de la batterie chute en deçà d’un certain niveau ; dans le cas contraire il peut être contourné.
Sur le plan technique, si ces deux blocs suffisent à fournir le courant nécessaire à un système d’infodivertissement, il faut toutefois prévoir un bloc supplémentaire. En effet, dans les systèmes électroniques automobiles, il est obligatoire d’installer un dispositif de protection contre les inversions de polarité afin d’éviter tout dommage en cas de mauvais raccordement de la batterie. Compte tenu du courant d’entrée relativement élevé que l’on voit généralement dans les batteries basse tension, il ne suffit pas d’installer une simple diode. L’idéal est de faire appel à un contrôleur de diode intelligent qui permet d’émuler la diode parfaite avec un transistor à effet de champ afin de réduire au maximum les pertes et les chutes de tension. Directement relié à la batterie de la voiture, ce bloc est suivi d’un filtre passe-bas permettant de réduire le bruit engendré par les alimentations à découpage suivantes.
La figure 1 présente le schéma des blocs du schéma de référence qui répond à toutes exigences décrites ci-dessus.
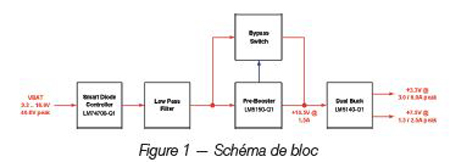
Le contrôleur de diode intelligent LM74700-Q1 s’appuie sur un transistor N-FET pour émuler une diode idéale, ce qui présente l’avantage non seulement de réduire les coûts, mais aussi de bénéficier de la grande variété de transistor à effet de champs disponibles sur le marché. En revanche, contrairement à une solution à base de transistor P-FET, il faut une tension positive plus élevée que la tension d’alimentation pour allumer le transistor. Le contrôleur LM74700-Q1 comprend donc un circuit à pompe de charge permettant de générer cette tension afin d’activer le transistor N-FET. Si l’entrée de déverrouillage coupe le contrôleur, la consommation de courant est réduite à 3 μA seulement. À noter : la désactivation du contrôleur n’empêche pas la diode du FET de conduire le courant car elle coupe uniquement le circuit interne de l’appareil.
Le filtre passe-bas réduit le bruit du mode différentiel engendré par les alimentations à découpage qui suivent. Conçu comme un filtre en PI avec une fréquence de coupure d’environ 1/10e de la fréquence de commutation des alimentations suivantes, il entraîne une ondulation théorique de quelque 40 dB. Cette baisse de valeur s’explique par la capacité de bobinage de l’inductance et par les autres éléments parasites du circuit.
Comme indiqué ci-dessus, la tension de la batterie peut chuter de manière significative au démarrage du moteur, en particulier lorsqu’il fait froid. Pour maintenir la puissance du système d’infodivertissement, on fait appel à un convertisseur pré-boost afin de fournir une tension d’entrée suffisamment élevée au convertisseur Dual Buck. Pour réduire la taille et le coût du pré-boost, il est possible de réduire ou de couper certaines charges lors du démarrage, comme les enceintes audio. Cela permet de réduire significativement le courant de sortie du préboost par rapport au courant de sortie global du circuit d’alimentation du système. Dans cette conception, le pré-boost ne fournit que quelque 40 % du courant habituel aux deux rails de sortie. La tension de sortie du contrôleur de charge LM5150-Q1 peut être définie sur 6,8, 7,5, 8,5 ou 10,5 V. Le système présenté ici utilise une tension de sortie de 10,5 V afin de conserver une marge élevée pour les entrées des convertisseurs Buck. L’appareil est optimisé pour les applications pré-boost : il démarre donc rapidement dès que la tension de batterie chute en deçà de la tension de sortie prédéfinie.
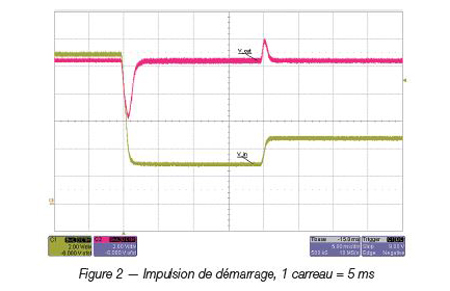
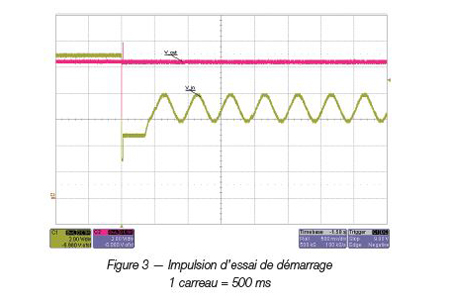
Les figures 2 et 3 représentent la tension de sortie du boost à 10,5 V pour une charge de 1,5 A, avec une impulsion d’essai au démarrage d’un Volkswagen E-11 mis en mode « sévère ». Même si le boost réagit rapidement, la tension de sortie chute à à peine plus de 6,0 V avant de se reprendre, comme en atteste la figure 2 (1 carreau = 5 ms). Ce phénomène s’explique par le recours à des condensateurs en céramique dans cette conception, pour des raisons de fiabilité. Les quatre condensateurs en céramique 10 μF (50 V, X7R, 1210) de la sortie du boost / l’entrée du convertisseur Buck sont peut-être trop lentes pour certaines applications, mais pour cet usage spécifique, le rail de +7,5 V n’a pas besoin d’être maintenu pendant le démarrage. Une telle chute relativement importante de la tension d’entrée du Buck reste donc acceptable. En revanche, s’il n’est pas possible de tolérer une chute importante de la tension de sortie, il faut alors mettre en place des capacitances de sortie plus élevée. Une bonne solution pour ce type d’application est de faire appel à des condensateurs hybrides qui présentent à la fois une capacitance plus élevée, une meilleure efficacité en matière de courant d’ondulation et une faible résistance en série équivalente. En choisissant un condensateur de sortie de l’ordre de quelques centaines de μF, on limite la chute de puissance dans le pire des cas à quelques centaines de millivolts seulement.
La figure 3 représente non seulement le début critique de l’impulsion d’essai, mais aussi la tension de batterie sinusoïdale dès que les moteurs du démarreur commencent à tourner. La tension de sortie est bien régulée à 10,5 V, sans la moindre perturbation.
Lorsque la tension de la batterie est supérieure à 10,5 V, le convertisseur boost ne peut plus commuter. Il paraît donc logique de contourner l’inducteur et la diode du boost afin de limiter les pertes. Dans cette conception, la broche d’état du LM5150-Q1 sert à contrôler un transistor P-FET placé en parallèle de l’inducteur et de la diode. Cette broche reste basse tant que l’appareil ne commute pas, et peut servir à déclencher directement un transistor P-FET. Lorsque le convertisseur boost commute, ce drain de sortie augmente et la tension du noeud de commutation permet de créer une tension qui coupe le P-FET.
Au final, les deux rails de sortie sont générés par le LM5140-Q1. Ce contrôleur Buick synchrone en mode double courant permet de choisir entre 440 kHz et 2,2 MHz pour la fréquence de commutation. Afin de limiter au maximum les pertes de commutation et d’optimiser l’efficacité, c’est la fréquence 440 kHz qui a été choisie pour le présent schéma de référence. Un shunt de mesure placé en série avec l’inducteur est utilisé afin d’améliorer la sensibilité au courant et la protection contre les surintensités. On peut paramétrer le seuil de surintensité à 48 mV ou 73 mV (typ.) afin de limiter les pertes de la résistance de mesure. Ce contrôleur permet également d’utiliser le convertisseur Buck en mode PWM forcé pour fluidifier les réponses, mais cela diminue son efficacité à faible charge. En choisissant la solution d’émulation par diode, on gagne considérablement en efficacité par faible charge. Un double transistor N-FET à commutation rapide et faible résistance de 60 V (Vishay SJQ260EP) en pack PowerPAK SO-8L a été choisi afin de limiter la taille totale du circuit, ce qui présente pour avantage non seulement de disposer d’un circuit aux dimensions moyennes, mais aussi d’une interface thermique de bonne qualité pour répartir les pertes sur la carte. Il convient également de choisir les inducteurs ad hoc pour davantage de compacité : c’est donc la série VCHA054T de Cyntec, de dimensions 5,4 mm x 5,2 mm x 3,8 mm, qui a été sélectionnée. Ce matériau composite présente des pertes centrales plus élevées que la ferrite, mais est plus petit et offre un courant de saturation plus élevé, un atout majeur pour les charges d’impulsion. Tous les condensateurs sont en céramique, gage de fiabilité élevée et de faible hauteur. Compte tenu de la vaste largeur de bande du convertisseur, de 30 à 40 kHz jusqu’à 440 kHz, une fréquence de commutation de 3x 47 μF (10 V, X7R, 1210) pour le rail de +3,3 V et de 2x 22 μF (16 V, X7R, 1210) pour le rail de +7,5 V suffisent.
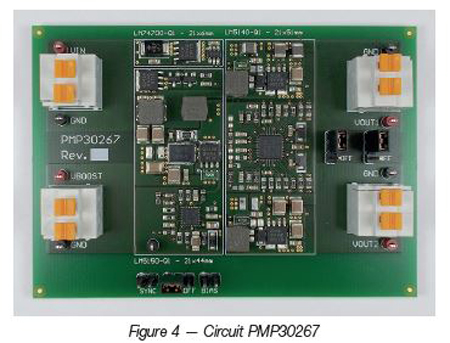
La figure 4 présente le circuit dans son intégralité, dont les dimensions sont 42 mm x 51 mm avec la quasi-totalité des composants montés sur la partie supérieure du circuit imprimé. La face inférieure ne contient que les deux diviseurs de tension avec rétroaction du dual Buick.
Un système d’infodivertissement automobile est une entité complexe qui a besoin de plusieurs rails d’alimentation. Ces rails doivent être présents en permanence afin d’assurer la stabilité de fonctionnement de l’appareil, sans interruption. Le démarrage d’un moteur par temps froid engendre une chute significative de la tension de la batterie, qui peut entraîner à son tour la coupure du système d’infodivertissement. L’architecture d’alimentation contient donc plus de blocs que seulement deux convertisseurs Buck afin de fournir les tensions d’alimentation requises. Cet article présente une solution d’alimentation complète pour un système d’infodivertissement à l’état de l’art avec protection active contre les inversions de polarité, convertisseur pré-boost et convertisseur Dual Buck synchrone permettant de créer les deux rails nécessaires. Pour tout complément d’information à propos de cette conception (schéma, liste de matériel, configuration, rapport d’essai et fichiers de conception), veuillez consulter le site Internet de TI :



