Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
![]() Un asservissement correctement réglé peut améliorer plusieurs paramètres de processus importants comme la stabilité, la précision et la productivité. Mais comment obtenir ces résultats ?
Un asservissement correctement réglé peut améliorer plusieurs paramètres de processus importants comme la stabilité, la précision et la productivité. Mais comment obtenir ces résultats ?
Si la résonance intrinsèque du système se trouve excitée lors d’un processus ou d’une opération, cela est susceptible d’entraîner une instabilité. Dans la plupart des cas, si les paramètres de sécurité du moteur sont bien configurés, cette instabilité ne provoquera guère plus qu’un bruit désagréable et un message d’erreur indiquant que le moteur a reçu trop de courant, désactivant ainsi l’axe. Cependant, dans certains cas, cela peut entraîner des dommages mécaniques si un mouvement incontrôlé fait cogner la charge contre une butée matérielle, ce qui peut entraîner un arrêt du processus. Le coût d’un mauvais réglage se traduit par une baisse significative des cadences de production, voire par d’éventuels dommages aux équipements.
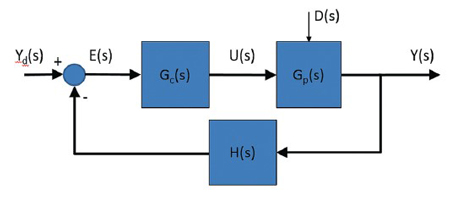
Avant de réfléchir aux solutions de réglage potentielles, un examen du problème dans son ensemble s’avère utile. Prenons l’exemple d’une application qui nécessite de commander le déplacement d’une masse d’inertie, pour permettre à une machine d’effectuer un mouvement dans une certaine direction, ou simplement jusqu’à une position donnée (d’où un capteur fournira un feedback, c’est-à-dire un retour d’information). En soustrayant le signal de retour (Y) du signal souhaité (Yd), on obtient un signal d’erreur (E), sur lequel le contrôleur peut agir pour fournir à la machine un signal de commande (U). Si le contrôleur est stable et robuste, la sortie suivra l’entrée désirée, même en présence de perturbations externes (D) et d’une certaine variation de l’installation. Les sorties système typiquement contrôlées sont la position, la vitesse, le courant et la force, mais toute variable système qui peut être mesurée (ou au moins estimée) peut faire l’objet d’un contrôle en boucle fermée. Souvent, le processus de réglage se fait dans le domaine temporel, mais les ingénieurs peuvent tirer profit du domaine fréquentiel pour améliorer encore les performances.
Une question fréquente est de savoir pourquoi il y a besoin d’un système en boucle fermée. En d’autres termes, la présence d’erreurs système, qui proviennent de facteurs comme le frottement, le déséquilibre des masses, l’erreur du capteur, le bruit électrique, les couples de démarrage et de freinage, les variations de l’installation et les perturbations environnementales, affecte la sortie du système de plusieurs manières indésirables. Si ces facteurs d’erreur n’existaient pas, une commande en boucle ouverte fonctionnerait très bien.
La plupart d’entre nous connaissent les régulateurs PID classiques, et savent bien que la réponse du système à un échelon varie quand on augmente ou diminue les différents gains. Bien qu’il s’agisse d’une opération assez courante, le problème avec le domaine temporel est l’absence générale de réelle compréhension du caractère de la structure résonante que l’on cherche à contrôler.
Travailler dans le domaine fréquentiel pour le réglage fournit davantage d’informations qui, utilisées en conjonction avec celles du domaine temporel, permettent d’obtenir une performance optimale du système d’asservissement pour les mouvements spécifiques demandés au système.
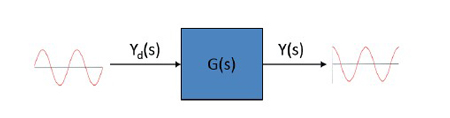
En termes simples, la réponse en fréquence est la réponse en régime permanent d’un système à entrée sinusoïdale. Pour des systèmes linéaires, la sortie aura la même fréquence que la fréquence d’entrée, mais pourra avoir une magnitude et une phase différentes. Pour chaque fréquence, la magnitude et la phase de sortie sont comparées à la magnitude et à la phase d’entrée. Les magnitudes et les phases issues de cette comparaison sont tracées en fonction de la fréquence. C’est ce que l’on appelle un diagramme de Bode. La plupart des contrôleurs disposent d’outils permettant de mesurer la réponse en fréquence d’un système. Il existe plusieurs méthodes pour obtenir la réponse en fréquence, les plus courantes étant les sinusoïdes discrètes, le bruit blanc et les méthodes à base de sinusoïdes multiples.
Les diagrammes de Bode ne sont pas le seul outil du domaine fréquentiel utilisé pour les systèmes de commande. On utilise souvent les FFT (Fast Fourier Transforms) pour étudier le contenu fréquentiel d’un signal temporel. Cela peut s’avérer utile pour déterminer une fréquence d’oscillation. Le diagramme de Bode fournira plus d’informations, comme la largeur et la profondeur de la résonance et, surtout, l’impact de cette résonance sur la stabilité du système.
Pour appliquer les outils, il faut disposer d’un modèle du système. Si l’on envisage le système comme un ensemble de masses reliées par des ressorts et des amortisseurs, on peut créer un modèle mathématique du système qui servira à prédire la réponse du système à une entrée spécifique, telle qu’un échelon. La complexité du modèle augmente avec le nombre de masses considérées. En l’occurrence, un modèle à deux masses est souvent suffisant pour prédire les réponses de premier ordre et peut fournir un aperçu de la façon d’ajuster le système.
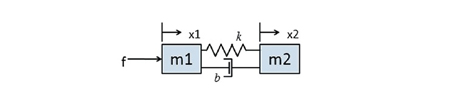
Considérez un axe linéaire avec une charge qui doit être positionnée avec précision. La tâche consiste à contrôler la position de la seconde masse en fonction de la force appliquée à la première. La position de la masse 2 dépendra des effets du ressort, de l’amortisseur, du rapport relatif des masses et de toute perturbation du système, telle que le frottement, généré par les coussinets ou autres roulements, ou les erreurs dues au capteur mesurant la position de la masse 1. Il n’est pas toujours possible ni économiquement envisageable de mesurer la position de la masse 2.
Lorsque l’on considère la réaction du système à une entrée, deux paramètres du domaine fréquentiel sont intéressants : la bande passante et l’amortissement. Une bande passante plus élevée signifie un temps de montée plus court et de meilleures performances globales du système, tandis qu’une diminution de l’amortissement se traduit par une augmentation des oscillations. Une bande passante élevée et un faible amortissement impliquent généralement une meilleure productivité de la machine.
Lors de l’activation d’un axe, un choc incontrôlable contre une butée matérielle nous amène généralement à envisager un réglage du système. Cependant, la génération d’un son aigu peut aussi indiquer une instabilité. Bien entendu, il vaut mieux régler le système pour qu’il soit robuste, en éliminant les sons aigus, les oscillations et les mouvements incontrôlés. Lorsque l’on travaille dans le domaine temporel, ce n’est pas toujours possible sans abaisser inutilement les performances du système en réduisant la bande passante avec un filtre passe-bas jusqu’à ce que la réponse résonante soit suffisamment amortie. En travaillant dans le domaine fréquentiel, il est possible d’optimiser les filtres coupe-bande afin d’atténuer la réponse résonante, tout en conservant une bande passante plus large qu’en utilisant uniquement des techniques de réglage dans le domaine temporel.
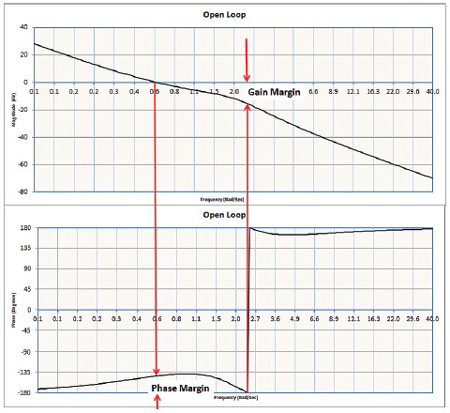
Pour ce faire, on utilise la réponse de transmission de boucle (ou gain de boucle). Théoriquement, tant qu’il existe une petite marge de gain et de phase, le système est stable. En pratique, pour qu’un système soit robuste il faut une marge de gain d’au moins 6 dB et une marge de phase d’au moins 30°. La marge de gain est la différence entre la ligne 0 dB et la courbe de gain à la fréquence où la phase croise 180°. La marge de phase est mesurée à partir de la courbe de phase jusqu’à 180° à la fréquence où le gain de boucle croise la ligne 0 dB.
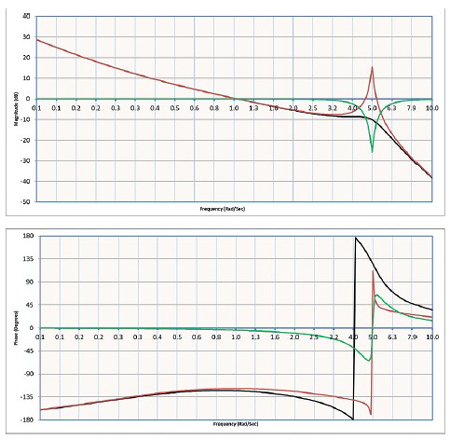
Pour illustrer l’utilisation de la réponse dans le domaine fréquence, examinons la transmission en boucle d’un système présentant une résonance à 5 rad/sec. Ici, les techniciens peuvent appliquer un filtre coupe-bande de profondeur et de largeur similaires, pour annuler la résonance de la machine. Notez que la résonance existe toujours dans le système mécanique, ce qui signifie qu’il reste possible de l’exciter, mais l’instabilité sera atténuée par les filtres coupe-bande et ne déstabilisera pas le système.
En éliminant la résonance de la boucle de commande, il devient possible d’augmenter le gain global du système, d’élargir la bande passante pour obtenir des temps de montée plus courts et, en fin de compte, d’accroître les performances de la machine. Dans le schéma ci-dessous, l’entrée est en rouge, le filtre coupe-bande est en vert, et la réponse résultante est en noir.
Lorsqu’on effectue une stabilisation, un bon objectif est de viser une bande passante maximale et une perte de phase minimale, car cela donne presque toujours un résultat optimal, même si en pratique, une certaine dose de jugement reste généralement nécessaire pour déterminer le niveau de marge acceptable. Lorsque l’on examine un diagramme de transmission en boucle, il ne faut pas se contenter d’examiner les fréquences de croisement de phase pour vérifier que la marge de gain est suffisante, mais aussi considérer les zones autour de ces points pour vérifier que les marges de gain sont faibles.
Avant de commencer le réglage, vérifiez que tout soit bien serré mécaniquement et que la machine soit de niveau. Les étapes suivantes s’appliquent généralement au réglage d’une masse inertielle.
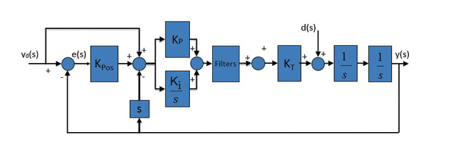
Pour la structure de boucle de commande présentée ci-cidessus, l’étape initiale de réglage consiste à fixer les gains Kpos et Kp à des valeurs très faibles, avec Kp = 10 Kpos et Ki = 0. Utilisez ensuite l’outil standard de réglage Autotune réglé pour une faible bande passante afin d’obtenir un bon point de départ pour la mise en forme de la boucle. Autotune va stimuler le système avec une série de sinusoïdes, et calculer un ensemble de gains avec une stabilité suffisante pour faire fonctionner une transmission en boucle.
Après avoir enregistré une transmission en boucle, identifiez le point de phase maximale du tracé, puis maximisez la fréquence de croisement en fonction de la pente du tracé de phase en augmentant la réponse en magnitude. À ce stade, il faut se méfier des modes résonnants à basse et moyenne fréquence et garder un oeil sur la marge de gain.
La tâche suivante consiste à introduire un filtre passebas. Réglez la fréquence du filtre aussi haut que possible pour perdre le moins de marge de phase possible, mais suffisamment bas pour supprimer le bruit du capteur. Veillez toutefois à ce que le filtre ne soit pas réglé trop bas, car cela réduirait les performances de la machine. Une bonne règle empirique consiste à appliquer un filtre passe-bas à environ 10 fois la fréquence de croisement, ce qui évite la perte de phase.
Ensuite, appliquez un filtre coupe-bande sur la fréquence centrale de toute résonance. Réglez la profondeur et la largeur du filtre pour aplanir suffisamment la courbe de gain aux fréquences correspondantes. Il doit maintenant être possible de monter la courbe de gain, tout en maintenant une marge de gain et une marge de phase suffisantes. Parmi les avantages, citons une bande passante plus large, une meilleure stabilité de l’axe et une productivité plus élevée de la machine, puisqu’elle aura un meilleur temps de réponse aux signaux d’entrée.
Pour une meilleure pratique, repassez dans le domaine temporel pour voir comment le système réagit à certaines opérations spécifiques de la machine, comme le contournage. Répétez cette étape si nécessaire. Ce processus doit également être répété à différents points de fonctionnement du système, notamment à différents endroits et avec différents niveaux de courant.
La mise en forme de la boucle sur le système lui-même présente de nombreux avantages, notamment l’utilisation de données mesurées (par opposition à des modèles analytiques) pour comprendre le caractère résonnant du système ; fournir un aperçu de l’effet non linéaire ; obtenir des mesures de stabilité quantitatives ; et, surtout, améliorer les performances du système par rapport à un réglage réalisé dans le domaine temporel uniquement.



