Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 La plateforme de simulation de conduite virtuelle DYNA4 de Vector couplée au dernier système de stimulation radar d’objets mobiles de Rohde & Schwarz rend possible la vérification efficace, dans un environnement de test intégré de type "hardware-in-the-loop" (HiL), des fonctions ADAS critiques du point de vue de la sécurité telles que le freinage d’urgence.
La plateforme de simulation de conduite virtuelle DYNA4 de Vector couplée au dernier système de stimulation radar d’objets mobiles de Rohde & Schwarz rend possible la vérification efficace, dans un environnement de test intégré de type "hardware-in-the-loop" (HiL), des fonctions ADAS critiques du point de vue de la sécurité telles que le freinage d’urgence.
La procédure de test HiL est mise en oeuvre pour accélérer le processus de développement de complexes systèmes embarqués de traitement temps réel tels que les systèmes avancés d’aide à la conduite (ADAS) lorsque l’utilisation d’un véhicule n’est pas possible, trop coûteuse, trop longue ou dangereuse. Le fonctionnement et le comportement des systèmes d’assistance sont alors simulés électroniquement.
Le système de test combine deux solutions. D’une part, le logiciel de test de conduite virtuelle Vector DYNA4, qui simule l’environnement et fournit l’interface utilisateur nécessaire à la configuration du scénario de test et à son exécution. D’autre part, le système de test radar Rohde & Schwarz qui génère des objets artificiels dynamiques à destination du capteur radar sous test sur la base des listes d’objets ASAM OSI implémentées dans le logiciel de simulation de l’environnement DYNA4. Vector CANoe reçoit les signaux de sortie du bus du capteur radar correspondant aux objets détectés, puis le logiciel les analyse et les visualise.
Les objets détectés sont également comparés aux éléments véritablement présents sur le terrain dans l’environnement simulé.
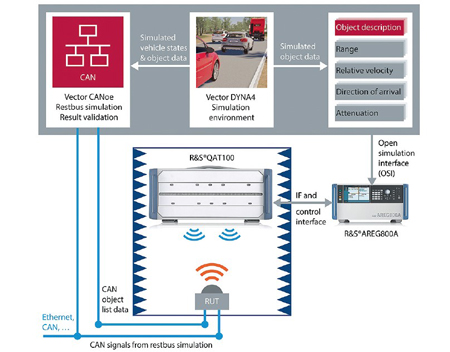
Le système de test radar de Rohde & Schwarz est composé du générateur d’échos radar automobile de la gamme R&S AREG800A faisant office de backend numérique et du réseau d’antennes avancé de la série R&S QAT100 utilisé comme interface frontale. Cette solution offre de toutes nouvelles possibilités pour le test des fonctions ADAS activées par radar et garantit la sûreté des fonctions de conduite autonome durant le processus de test HiL. La technologie innovante du réseau d’antennes permet de générer à destination des capteurs radar des objets artificiels complexes situés à différentes distances et présentant une vitesse radiale, une dimension et une direction angulaire variables. Les antennes et les équipements de test n’ont pas à être déplacés physiquement. Une réactive interface HiL dédiée, conforme à la spécification ouverte ASAM relative à l’interface de simulation, permet une stimulation réaliste par voie aérienne des capteurs radar dans le cadre de scénarios de conduite difficiles, complexes voire même risqués. La pérennité du système de test radar est garantie par sa modularité et son évolutivité. Outre la possibilité de tester les fonctions radar standards des ADAS, tels que les scénarios de régulation de vitesse adaptative (ACC) et de freinage d’urgence autonome (AEB), le système peut être facilement mis à niveau pour prendre en charge des cas de test plus avancés. Il peut évoluer afin répondre à la complexité de futurs scénarios. Ce qui constitue une étape importante sur la voie du développement de systèmes de conduite autonome.
L’association de ce qui se fait de mieux en matière de simulation de conduite et de stimulation radar par voie aérienne représente une avancée significative. Ce qui accélère le processus de développement des fonctions ADAS. Cela permet aux utilisateurs de tester, de manière fiable et réaliste, les fonctions ADAS/AD et de maîtriser de complexes processus de validation dans un environnement représentatif entièrement contrôlable.



