Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 De plus, un flybuck assure généralement une commutation plus en douceur par rapport à une topologie flyback, ce qui peut éviter le recours à un circuit d’amortissement et limiter les interférences électromagnétiques. Mais comment améliorer les performances d’un flybuck ? Cet article présente trois méthodes pouvant être appliquées individuellement ou conjointement. La première privilégie l’utilisation d’une topologie de circuit inverseur, qui influencera la plage de rapport cyclique et augmentera donc les performances et le rendement dans de nombreuses applications. La deuxième méthode consiste à ajouter un redresseur synchrone, qui réduira les pertes côté secondaire et améliorera la régulation de la tension de sortie. Celle-ci pourra par ailleurs être optimisée grâce à la dernière méthode, qui fait intervenir un photocoupleur en charge de réguler la tension de sortie.
De plus, un flybuck assure généralement une commutation plus en douceur par rapport à une topologie flyback, ce qui peut éviter le recours à un circuit d’amortissement et limiter les interférences électromagnétiques. Mais comment améliorer les performances d’un flybuck ? Cet article présente trois méthodes pouvant être appliquées individuellement ou conjointement. La première privilégie l’utilisation d’une topologie de circuit inverseur, qui influencera la plage de rapport cyclique et augmentera donc les performances et le rendement dans de nombreuses applications. La deuxième méthode consiste à ajouter un redresseur synchrone, qui réduira les pertes côté secondaire et améliorera la régulation de la tension de sortie. Celle-ci pourra par ailleurs être optimisée grâce à la dernière méthode, qui fait intervenir un photocoupleur en charge de réguler la tension de sortie.
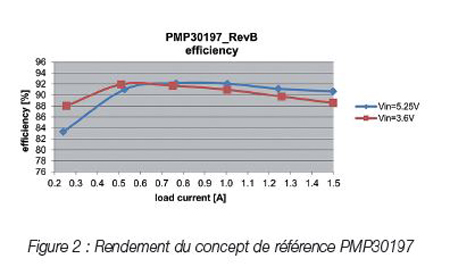
La figure 1 montre un schéma simplifié de flybuck inverseur avec photocoupleur et redressement synchrone secondaire.
Dans un flybuck, la tension d’entrée minimale doit toujours être supérieure à la tension de sortie primaire. Cela se traduit très fréquemment par un rapport cyclique élevé à une faible tension d’entrée, ce qui représente un inconvénient pour de nombreuses applications flybuck, car les rapports cycliques élevés augmentent sensiblement les courants de crête. En présence d’une importante inductance de fuite, le flybuck n’est donc probablement pas compatible avec un rapport cyclique de plus de 60 %. Il existe heureusement une alternative. L’abaisseur peut en effet être remplacé par un circuit buck-boost inverseur. Le rapport cyclique sera alors inférieur dans de nombreuses applications. Cette solution n’est bien sûr envisageable que si une tension positive n’est pas requise côté primaire dans la mesure où le buck-boost génère une tension primaire négative. N’importe quel contrôleur abaisseur synchrone peut être utilisé pour réaliser un circuit buck-boost inverseur générant une tension de sortie négative. Il s’agit simplement d’une astuce pour faire fonctionner le contrôleur. Dans un abaisseur standard, la tension de sortie est connectée à une bobine, et le retour, à la terre. Pour obtenir un circuit buck-boost inverseur, il suffit de raccorder la terre du composant à la sortie négative (et non pas à la terre) et d’insérer un condensateur supplémentaire entre l’entrée et la sortie négative (voir figure 1). Dans cette configuration, le contrôleur abaisseur générera une tension de sortie négative. Il convient de tenir compte de la tension VDD maximale du contrôleur. Une fois la sortie régulée, le contrôleur est référencé à la sortie négative. La tension VDD maximale détectée par le contrôleur correspond donc à la différence entre la tension d’entrée et la tension de sortie. Notez que le verrouillage en cas de sous-tension (UVLO) ne fonctionnera pas correctement, car celle-ci est bien plus faible dans cette configuration.
Il existe plusieurs méthodes pour piloter des redresseurs synchrones côté secondaire. Vous pouvez par exemple ajouter un transformateur de pilote de grille distinct dédié au FET synchrone secondaire. Si un contrôleur primaire est associé à des MOSFET primaires externes, le signal de commande pourra alors être reçu côté primaire. Il est également possible d’utiliser un contrôleur synchrone côté secondaire. Cette méthode, bien qu’onéreuse, assure généralement une commande parfaite du FET. Plus simple et meilleur marché, vous pouvez compléter le transformateur flybuck d’une bobine de pilote de grille. Cette technique, qui s’apparente à un « autopilotage », ne coûte que quelques centimes, mais présente malheureusement un sérieux inconvénient : la synchronisation ne peut pas être précisément commandée, ce qui peut entraîner un bref courant « shootthrough ». Ce phénomène augmente la dissipation de puissance et impacte le rendement. Le circuit doit être vérifié en laboratoire afin de garantir un fonctionnement sûr en toutes conditions. Néanmoins, un redresseur synchrone autopiloté améliorera le rendement et la régulation de la tension de sortie par rapport à une diode de sortie. La figure 1 montre le circuit simplifié d’un FET synchrone autopiloté (en beige).
En mode de commande côté primaire, la tension de sortie secondaire est régulée via le couplage de la tension côté primaire. La sortie secondaire est commandée uniquement par la sortie primaire et le transformateur. Les chutes de tension du redresseur en sortie ou les éléments parasites, tels que l’inductance de fuite, la résistance des bobines, la topologie ou d’autres composants, ne peuvent pas être compensés. La régulation de la tension de sortie est donc généralement limitée à 5-10 %. Pour plus d’efficacité, il est possible d’utiliser un photocoupleur afin de réguler la tension de sortie secondaire. Comment la tension de sortie est-elle régulée ? La figure 1 montre le circuit simplifié de la régulation d’un photocoupleur. Un amplificateur d’erreur (U3), tel que le TL431, est associé à un photocoupleur pour isoler la boucle de rétroaction. La moindre fluctuation de la tension de sortie due à des variations de la ligne ou de la charge est détectée par l’entrée de l’amplificateur d’erreur et comparée à une référence de tension interne. La différence entre la tension de sortie divisée (R7, R8) et la tension de référence est convertie en courant d’erreur. Le signal d’erreur est transmis côté primaire via le photocoupleur. Côté primaire, le contrôleur (U1) régule la tension primaire négative. Comme c’est le cas côté secondaire, un diviseur de tension (R3, R4) mesure et compare la tension de sortie à la référence de tension interne du contrôleur. En d’autres termes, il existe deux chemins de rétroaction, l’un côté primaire, l’autre côté secondaire. L’association de ces deux chemins s’effectue par simple connexion du phototransistor au diviseur de tension côté primaire (voir figure 1). Le phototransistor étant monté en parallèle de la résistance côté haut (R3), la résistance effective diminue inéluctablement. C’est la raison pour laquelle le diviseur de tension côté primaire doit être choisi avec soin. Pour que la boucle secondaire puisse à la fois augmenter et réduire la tension de sortie, la boucle primaire doit elle-même réguler une tension primaire supérieure (en valeur absolue) à celle requise. Cela signifie que le diviseur de tension côté primaire doit être paramétré pour prendre en charge une tension de sortie négative plus élevée (en valeur absolue). La boucle secondaire a, par conséquent, la capacité d’accroître et d’abaisser la tension de sortie nécessaire en présence de transitoires.
La topologie flybuck s’est fortement popularisée ces dernières années. Ses performances sont cependant parfois insuffisantes, notamment pour les applications impliquant une vaste plage de tensions d’entrée ou de niveaux de puissance. Les méthodes présentées ici permettent d’améliorer le comportement de cette topologie isolée.
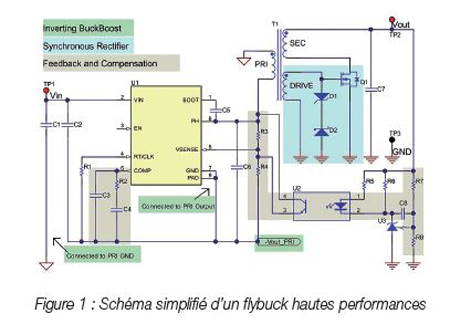
Le concept de référence PMP30197 de Texas Instruments propose un exemple pratique de flybuck inverseur avec rétroaction de photocoupleur et redressement synchrone. Son rendement maximal dépasse les 92 % (voir figure 2), et sa régulation du courant de charge, 1,5 %.