Electronique Mag - Le journal de l'électronique.
- accueil .
- abonnement .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 En règle générale, les capteurs qui surveillent l’environnement à l’extérieur du véhicule comprennent des radars, des caméras et des systèmes de détection et de télémétrie par ondes lumineuses (LiDAR). Les systèmes d’aide à la conduite assistent le conducteur dans un large éventail d’opérations de conduite, telles que l’alerte en cas de collision, le freinage automatique et l’aide au stationnement. Dans la conduite autonome, les données des capteurs sont utilisées pour contrôler automatiquement le véhicule.
En règle générale, les capteurs qui surveillent l’environnement à l’extérieur du véhicule comprennent des radars, des caméras et des systèmes de détection et de télémétrie par ondes lumineuses (LiDAR). Les systèmes d’aide à la conduite assistent le conducteur dans un large éventail d’opérations de conduite, telles que l’alerte en cas de collision, le freinage automatique et l’aide au stationnement. Dans la conduite autonome, les données des capteurs sont utilisées pour contrôler automatiquement le véhicule.
Les radars automobiles fonctionnent généralement dans les bandes de 24 et 76 GHz. La bande 24 GHz est utilisée pour la surveillance du périmètre à courte et moyenne distance, pour la réduction des dommages avant et après une collision, ainsi que pour la surveillance de l’avant et de l’arrière du véhicule. En raison de sa haute résolution, le radar 76-77 GHz est principalement utilisé pour détecter les obstacles situés entre 100 et 200 mètres devant le véhicule. Le radar est également utilisé pour des applications de détection à l’intérieur du véhicule ou "dans l’habitacle". Par exemple, les systèmes qui empêchent les enfants ou les animaux d’être laissés seuls dans les voitures fonctionnent dans les bandes de fréquences de 60 à 77 GHz. Le tableau 1 indique les fréquences attribuées aux radars automobiles dans chaque région.
Les mesures des radars automobiles utilisent soit la méthode des impulsions, soit celle des ondes continues modulées en fréquence (FMCW). La méthode des impulsions mesure le temps d’aller-retour de l’onde radio entre l’émetteur-récepteur et l’objet, ainsi que sa réflexion.
La méthode FMCW transmet à un objet des signaux radio périodiques dont la fréquence augmente au cours d’une certaine période. Les ondes radio transmises et réfléchies interfèrent pour générer un signal de battement. L’analyse de la différence de fréquence et d’autres facteurs obtenus à partir du signal de battement permet de déterminer la distance d’un objet et sa vitesse. La figure 1 présente les schémas de modulation du signal pour les radars automobiles.

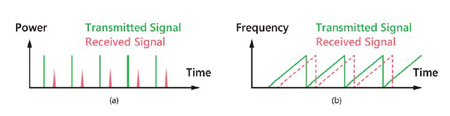
Contrairement au radar à impulsions, le FMCW offre des avantages tels qu’une faible puissance de transmission et un rapport signal/bruit élevé. De plus, la réponse en fréquence relativement basse du circuit émetteur-récepteur permet une conception simple, ce qui réduit les coûts. Par conséquent, la méthode FMCW est largement utilisée dans les radars automobiles.
Un signal dont la fréquence augmente linéairement avec le temps est connu sous le nom de chirp (figure 2a) et est essentiel à la performance du signal FMWC.
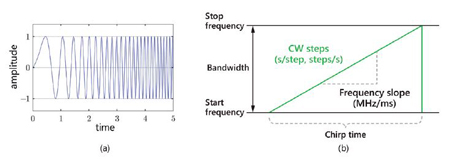
À partir du signal chirp illustré à la figure 2 (b), l’axe vertical étant remplacé par la fréquence, on obtient la résolution en distance et la portée maximale de la distance. Il s’agit des principales caractéristiques de performance du radar FMCW. La résolution en distance Dres est exprimée par :
Dres = c/2B = c/2STc
où c est la vitesse de la lumière, B la largeur de bande du chirp (fréquence de fin - fréquence de début), S la pente du chirp et Tc la durée du chirp.
D’après l’équation, plus la largeur de bande du chirp est importante, plus la résolution détectable est élevée. Par exemple, la résolution en distance de la portée est d’environ 7,5 cm pour une largeur de bande du chirp de 2 GHz, et d’environ 3,8 cm pour une largeur de bande du chirp de 4 GHz.
La portée maximale de détection est inversement proportionnelle à la pente ds chirp S, qui représente le taux d’augmentation de la fréquence. Cela signifie que plus la pente du chirp est faible, plus la portée de détection maximale est grande.
Pour une durée de chirp fixe, une largeur de bande plus large B se traduira par une résolution plus élevée.
Toutefois, il en résulte un compromis car la portée de détection maximale est réduite du fait que la pente du chirp augmente avec la largeur de bande. Ce compromis exige de la prudence lors de la conception de systèmes radar pour l’automobile.
Les radars automobiles à ondes millimétriques donneront la priorité à la portée de détection ou à la résolution en fonction de l’application. Par exemple, dans le cas d’un régulateur de vitesse adaptatif, la capacité à détecter un véhicule à longue distance est importante, alors qu’une haute résolution n’est pas nécessaire. En revanche, la prévention des collisions exige une résolution élevée, car le véhicule doit réagir rapidement à des changements soudains à courte distance.
A partir du signal chirp, la résolution de la vitesse du radar Vres et la vitesse de détection maximale Vmax peuvent également être calculées à l’aide de :
Vres = 𝛌/2Tc
Vmax = 𝛌/4Tc
où la longueur d’onde du radar 𝛌 = c/f.
La vitesse de détection maximale Vmax est inversement proportionnelle à la durée du chirp Tc. La réduction de la durée du chirp augmente la vitesse de détection maximale. Cependant, la réduction de la durée du chirp affecte négativement la résolution de la portée.
Une trame radar comprend quelques centaines de chirps. Une trame de chirp est illustrée à la figure 3.
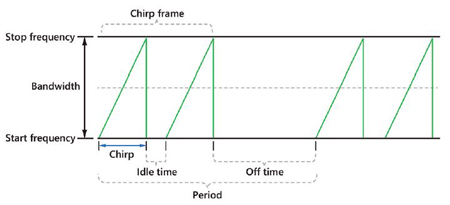
Le temps d’une trame Tf est calculé en multipliant le nombre de chirps par la somme de la durée du chirp et du temps d’attente (d’inactivité) jusqu’à l’émission du signal chirp suivant :
Tf = (Tc + Twait) x N
où Twait est le temps d’attente ou d’inactivité jusqu’à l’envoi du chirp suivant, et N est le nombre de chirps.
L’utilisation de plusieurs chirps dans une trame permet d’obtenir des informations Doppler de l’objet afin de déterminer avec précision sa vitesse. Il existe également un temps d’arrêt variable entre chaque image, qui peut être utilisé pour améliorer l’efficacité énergétique du chipset.
Les facteurs qui rendent difficile la mesure des signaux chirp sont notamment les changements de fréquence du chirp en un temps extrêmement court, la modulation à bande ultra-large et une fréquence du chirp plus élevée. Souvent, ces trois facteurs doivent être pris en compte simultanément.
Les chirps sont mesurés à l’aide d’un analyseur de spectre, qui est généralement utilisé pour évaluer les caractéristiques de transmission des équipements de communication sans fil. Il existe deux types d’analyseurs de spectre : à balayage et en temps réel. L’analyseur de spectre à balayage est basé sur la technologie superhétérodyne dans laquelle l’échantillonnage et le traitement du signal sont des opérations répétées de manière séquentielle. Lorsque la fréquence du chirp change sur une période extrêmement courte, l’analyseur de spectre à balayage ne peut souvent pas suivre en raison du traitement séquentiel, et ne parvient pas à capturer certains des chirps. Les sections où le chirp n’est pas capturé sont appelées "zones aveugles".
L’analyseur de spectre temps réel, qui exploite les transformées de Fourier rapides, effectue l’échantillonnage et le traitement du signal en parallèle, ce qui lui permet de saisir les variations à court terme du signal chirp. Toutefois, la gamme de fréquences de mesure ou la largeur de bande d’analyse de l’analyseur de spectre en temps réel est limitée à la largeur de bande de l’instrument, qui est généralement de quelques dizaines à quelques centaines de MHz. C’est insuffisant par rapport à la largeur de bande du chirp FMCW pour les radars automobiles qui va de quelques dizaines de MHz à quelques dizaines de GHz. Pour résoudre ce problème, il est nécessaire de mesurer plusieurs gammes de fréquences dans la largeur de bande de chirp et d’"assembler" les formes d’onde. Cette méthode permet de capturer l’intégralité de la largeur de bande du chirp, mais le temps nécessaire pour changer de gamme de fréquence peut donner lieu à une zone aveugle.
Pour obtenir la solution la plus complète, on utilise souvent la combinaison d’un oscilloscope et d’un analyseur de spectre pour mesurer le chirp. L’oscilloscope est suffisamment rapide pour acquérir les caractéristiques complètes en temps et la réponse en fréquence du chirp, ainsi que pour capturer des signaux sinusoïdaux. L’analyseur de spectre est également utilisé pour analyser les formes d’onde acquises par l’oscilloscope afin d’évaluer les caractéristiques en fréquence.
L’analyseur de spectre à bande ultra-large MS2760A d’Anritsu, compact et facile à utiliser, peut mesurer les caractéristiques de base des signaux radar à ondes millimétriques pour automobiles, telles que la fréquence de démarrage/arrêt du signal chirp FMCW, la largeur de bande, l’amplitude, la durée/période de la trame et le nombre de chirps par trame.
La figure 4 montre les résultats d’une mesure de chirp FMCW sur une bande de 1 GHz entre 76 et 77 GHz à l’aide du MS2760A. L’instrument capture tous les chirps FMCW en un seul balayage. Après la mesure, les données sont traitées à l’aide d’un PC.
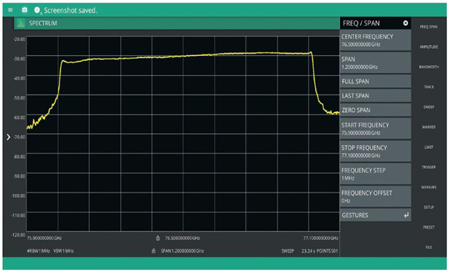
L’une des principales caractéristiques du MS2760A est sa capacité à couvrir une gamme de fréquences continue allant de 9 kHz à 170 GHz pour les applications à bande ultra-large. De plus, cet instrument ultra compact est facile à transporter à installer et à mesurer dans des environnements de production, de chambre de test et des essais sur le terrain.
Ces caractéristiques sont rendues possibles par la technologie brevetée de ligne de transmission non linéaire (NLTL) d’Anritsu, qui élimine le besoin d’un mélangeur large bande pour la conversion en fréquence basse. Le récepteur NLTL "Shockline" d’Anritsu peut générer des harmoniques à très hautes fréquences et échantillonner jusqu’à 170 GHz.
Grâce à sa taille compacte, le MS2760A permet d’installer de nombreux analyseurs de spectre afin d’améliorer l’efficacité des tests et de réduire le risque de retards dans les projets et des investissements coûteux.
Alors que les radars automobiles à ondes millimétriques sont de plus en plus perfectionnés, l’utilisation de la méthode FMCW dominante crée des défis de test en raison des changements rapides de fréquence de chirp, de la largeur de bande ultra large et des fréquences plus élevées. La technologie NLTL répond à ces défis avec un seul instrument à bande ultra-large, le MS2760A, qui est non seulement petit mais idéal pour les tests de radar FMWC de base pour supporter les besoins de mesures liés aux applications ADAS et AD.



